
SSRS: Shortrange Surveillance Radar System
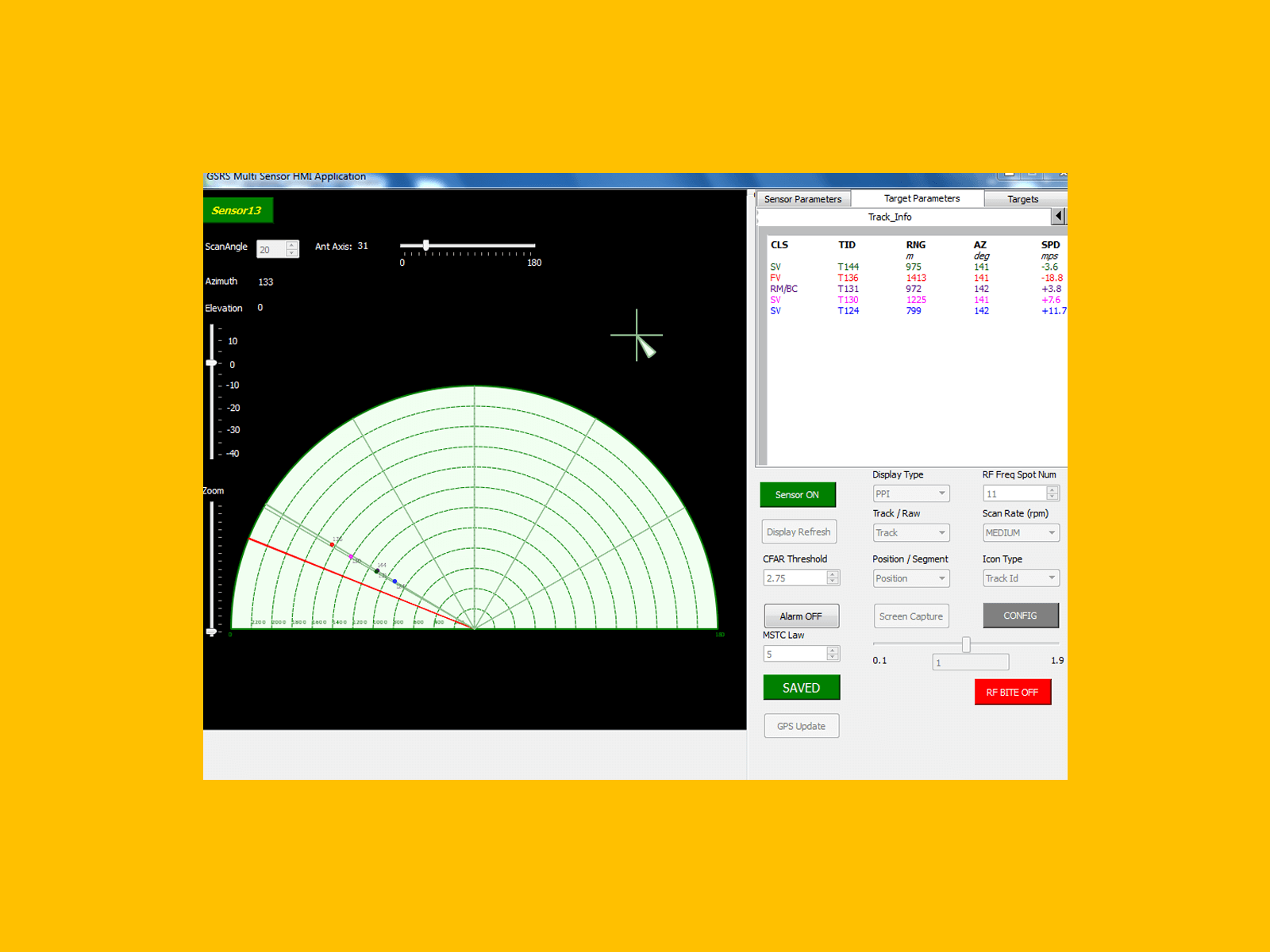
Fully indigenous Shortrange Surveillance Radar System (SSRS) provides 24x7 all-weather intrusion detection and alarm function for borders, large campuses, ports, airports, special economic zones, establishments, farmlands etc., through a series of short-range radar sensors networked to a single central command and control centre.
SSRS has the capabilities to detect, track (while scan) as well as automatically classify ground surface moving targets such as crawling man, walking man, cycling man, slow moving vehicle, fast moving vehicle.
Multiple selectable RF frequency spots ensure that different sensors do not interfere with one another.
The data processing capabilities of the system include Range, Doppler and Azimuth Centroiding, Track-while-scan processing as well as α-β Kalman filtering.
The built in GPS and digital magnetic compass, helps translating the target positions relative to the sensor to geographical lat-lon values – thus enabling the plotting of the targets on geographical maps using internet-based map services.
The system provides for a configurable alarm function – depending on the range and speed of the target the alarm gets triggered. The system has three types of alarms – audio alarm, visual alarm and network alarm.
The sensors are networked over Ethernet to the central command and control terminal. The Command and Control is provided through a GUI application that can run on any Windows/Linux based general purpose computers/laptops.-
Operational Characteristics
- J-Band Operation
- Mean Azimuth: 0° to 180°
- Sector Size: 0° to 180°
- Depth of Surveillance: 0 to 1000 m
- Target Track Presentation: PPI/Range–Azimuth Plot
- Ground Clutter Map Background in PPI
- Track-While-Scan
- Audio based target classification
- Built in GPS & Digital Magnetic Compass
- Ethernet based communication between the Sensor and the HMI
- Automatic Target Classification

-
Technical Specifications
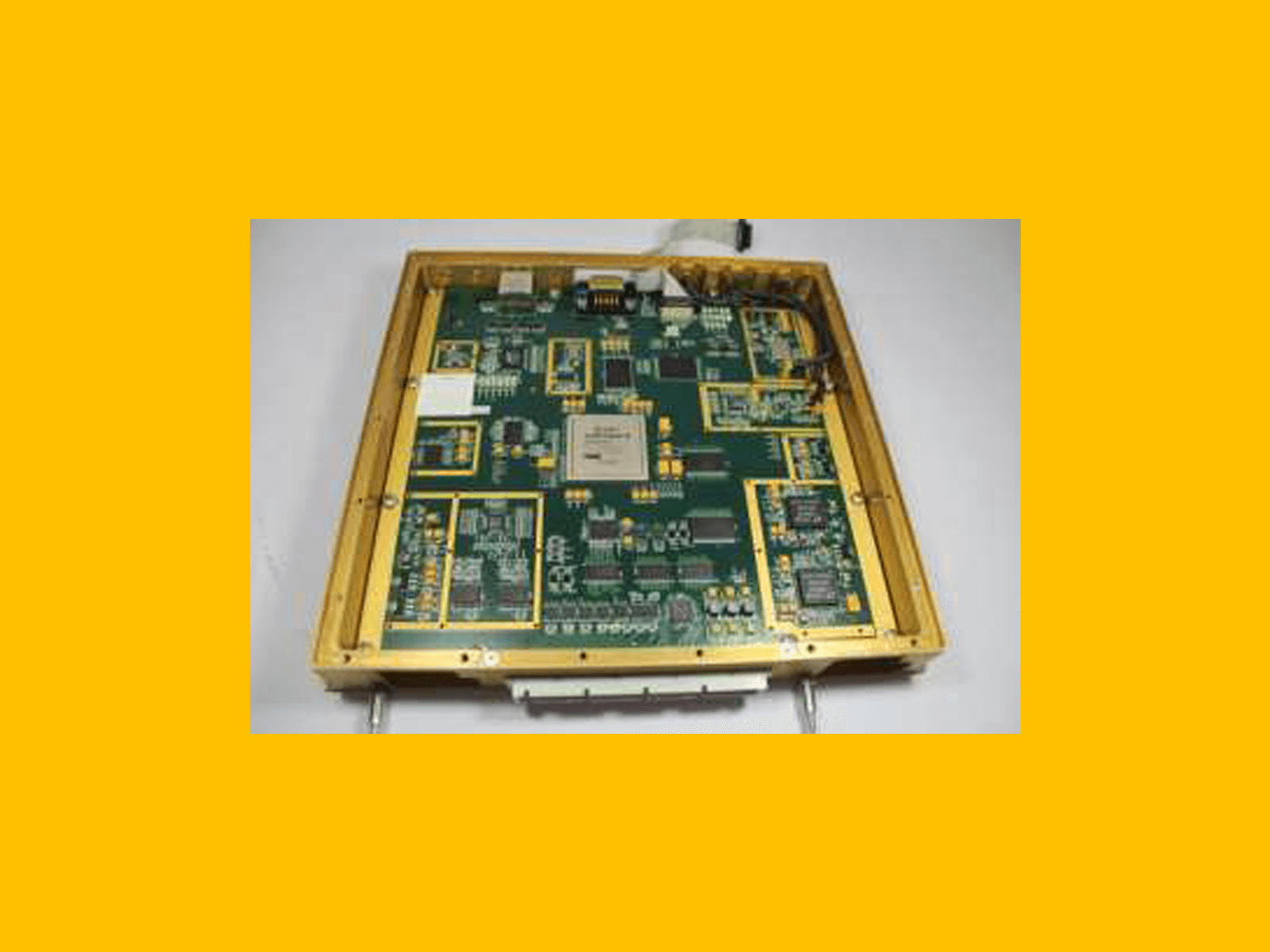
- Transceiver
- Fully Coherent Doppler processing
- Power consumption : 30W (typical)
- Peak radiated RF power: 5W
- Antenna: Microstrip Patch Array Technology
- Human-Machine Interface: Windows / Linux based GUI application which can run on Intel i3 or better processor platform
- Communication interface: Ethernet
- Power Source: 20V to 28V
-
Performance Parameters
- Ranges for different class of targets
- Crawling Man: 300 m
- Single Walking Man: 500 m
- Group of Walking Men: 700 m
- Moving Vehicles: 1000 m
- Range Resolution: 30 m
- Azimuth Resolution: 5°
- Constant False Alarm Rate Automatic Detector
- Probability of Detection: 0.9 single scan
- Probability of False Alarm: < 10-6
- Multiple Frequency Spots of operation
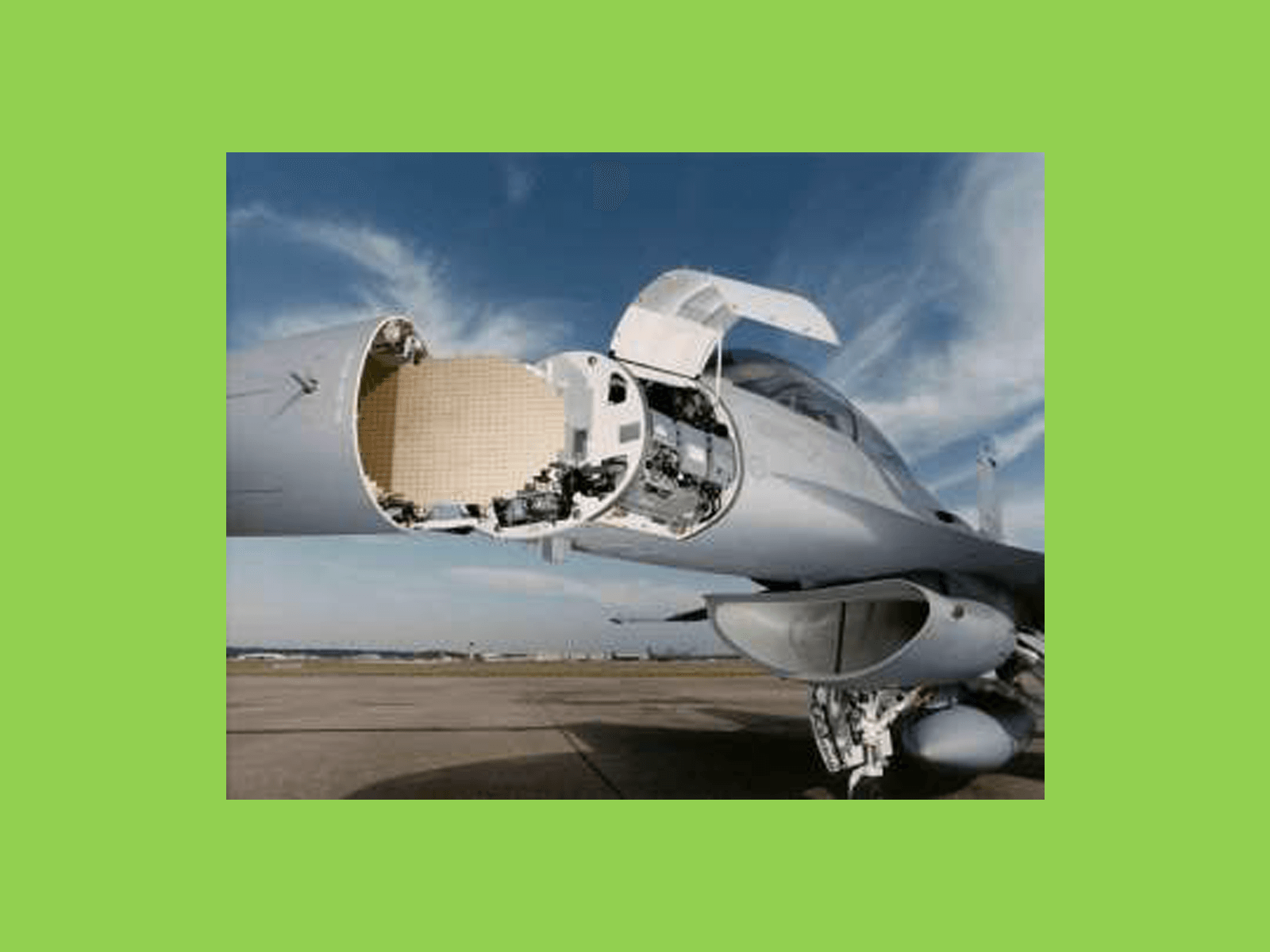
Airborne Multimode Radar System
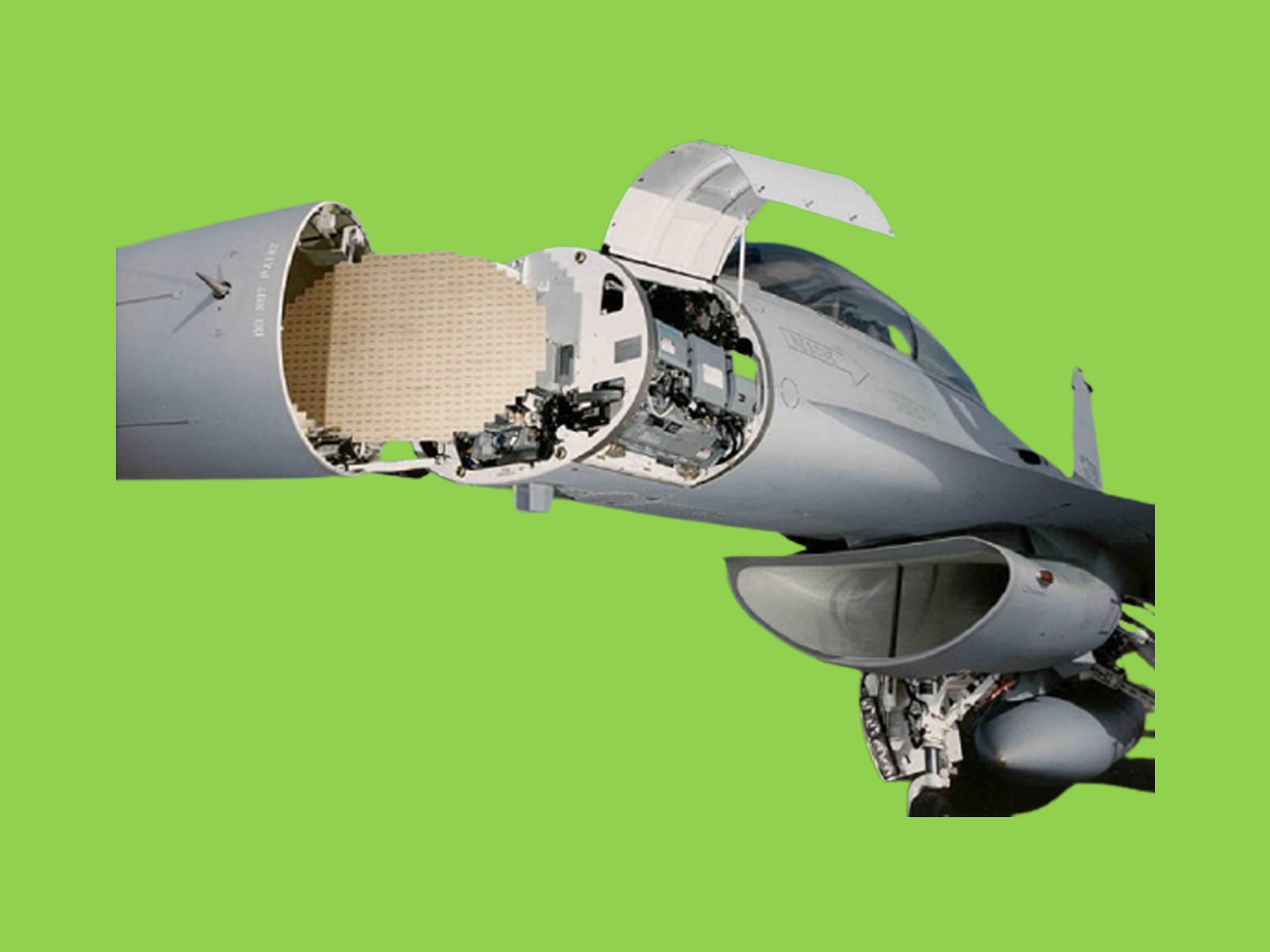
An indigenous Active Electronically Scanned Array Multi-mode airborne radar capable of tracking multiple targets in 100Km+ range. Modes supported:
- Air to Sea
- Air to Air
- Air to Ground
- Navigation & Weather
-
Applications
- Navigation, Fire Control
- Fighter planes
-
Technical Specifications
- Software based signal processing
- Multi mode operation – dynamic changing of modes
- Multi-core PowerPC based
- VxWorks 6.7 SMP RTOS
- Streaming Pipeline SW architecture
- Imaging algorithms for SAR & ISAR modes
Desktop based Radar Environment & Target Simulator (RETS)
Testing and functional qualification of radars is an expensive and a resource consuming exercise, more so for airborne radars, easily running into millions of dollars over the development cycle of a new radar. Given that the radar theory and operation is built on probability and random processes, it is almost impossible to replicate the exact same radar environment conditions when detection and tracking algorithms are being developed and evaluated. A Radar Environment and Target Simulator (RETS) plays a key role in not only reducing the resources required, but also provides a repeatable scenario to help evaluate new algorithms. The RETS, for which Traana carried out the development work, provides a graphical interface allowing the user to create multiple scenarios consisting of multiple airborne targets, jammers and radars. Each such platform can be independently modelled by inputting various parameters such as the target cross section across different aspect angles, the radar transmission power, the antenna gain patterns, jamming techniques, etc., and, defining its trajectory of motion, graphically. The RETS operates in real time, simulating the RF echo parameters, such as the delay, the amplitude and the Doppler, from the different targets which can be used in BITE generation at different subsystem inputs.
SSRS: Shortrange Surveillance Radar System
Fully indigenous Shortrange Surveillance Radar System (SSRS) provides
24x7 all-weather intrusion detection and alarm function for borders, large
campuses, ports, airports, special economic zones, establishments,
farmlands etc., through a series of short-range radar sensors networked to a
single central command and control centre.
SSRS has the capabilities to detect, track (while scan) as well as
automatically classify ground surface moving targets such as crawling man,
walking man, cycling man, slow moving vehicle, fast moving vehicle.
Multiple selectable RF frequency spots ensure that different sensors do not
interfere with one another.
The data processing capabilities of the system include Range, Doppler and
Azimuth Centroiding, Track-while-scan processing as well as α-β Kalman
filtering.
The built in GPS and digital magnetic compass, helps translating the target
positions relative to the sensor to geographical lat-lon values – thus enabling
the plotting of the targets on geographical maps using internet-based map
services.
The system provides for a configurable alarm function – depending on the
range and speed of the target the alarm gets triggered. The system has three
types of alarms – audio alarm, visual alarm and network alarm.
The sensors are networked over Ethernet to the central command and control
terminal. The Command and Control is provided through a GUI application that can run on any Windows/Linux based general purpose computers/laptops.
- Operational Characteristics
- J-Band Operation
- Mean Azimuth: 0° to 180°
- Sector Size: 0° to 180°
- Depth of Surveillance: 0 to 1000 m
- Target Track Presentation: PPI/Range–Azimuth Plot
- Ground Clutter Map Background in PPI
- Track-While-Scan
- Audio based target classification
- Built in GPS & Digital Magnetic Compass
- Ethernet based communication between the Sensor and the HMI
- Automatic Target Classification
- Technical Specifications
- Transceiver
- Fully Coherent Doppler processing
- Power consumption : 30W (typical)
- Peak radiated RF power: 5W
- Antenna: Microstrip Patch Array Technology
- Human-Machine Interface: Windows / Linux based GUI application which can run on Intel i3 or better processor platform
- Communication interface: Ethernet
- Power Source: 20V to 28V
- Performance Parameters
- Ranges for different class of targets
- Crawling Man: 300 m
- Single Walking Man: 500 m
- Group of Walking Men: 700 m
- Moving Vehicles: 1000 m
- Range Resolution: 30 m
- Azimuth Resolution: 5°
- Constant False Alarm Rate Automatic Detector
- Probability of Detection: 0.9 single scan
- Probability of False Alarm: < 10-6
- Multiple Frequency Spots of operation
Airborne Multimode Radar System
An indigenous Active Electronically Scanned Array Multi-mode airborne radar capable of tracking multiple targets in 100Km+ range. Modes supported:
- Air to Sea
- Air to Air
- Air to Ground
- Navigation & Weather
Applications
- Navigation, Fire Control
- Fighter planes
Technical Specifications
- Software based signal processing
- Multi mode operation – dynamic changing of modes
- Multi-core PowerPC based
- VxWorks 6.7 SMP RTOS
- Streaming Pipeline SW architecture
- Streaming Pipeline SW architecture
- Imaging algorithms for SAR & ISAR modes
Desktop based Radar Environment & Target Simulator (RETS)
Testing and functional qualification of radars is an expensive and a resource consuming exercise, more so for airborne radars, easily running into millions of dollars over the development cycle of a new radar. Given that the radar theory and operation is built on probability and random processes, it is almost impossible to replicate the exact same radar environment conditions when detection and tracking algorithms are being developed and evaluated. A Radar Environment and Target Simulator (RETS) plays a key role in not only reducing the resources required, but also provides a repeatable scenario to help evaluate new algorithms. The RETS, for which Traana carried out the development work, provides a graphical interface allowing the user to create multiple scenarios consisting of multiple airborne targets, jammers and radars. Each such platform can be independently modelled by inputting various parameters such as the target cross section across different aspect angles, the radar transmission power, the antenna gain patterns, jamming techniques, etc., and, defining its trajectory of motion, graphically. The RETS operates in real time, simulating the RF echo parameters, such as the delay, the amplitude and the Doppler, from the different targets which can be used in BITE generation at different subsystem inputs.

Digital Signal Processing
Through the advent of signal processing technology a lot of hardware processing has switched over to software, once complicated filters are being easily implemented.
Through our projects we have gained expertise in signal processing domain while implementing algorithms such as Pulse compression, Moving Target Indicator, Constant False Alarm Rate that are the basis of Radar functionality. Through projects like (IRDE Project name insert) we have worked on Image processing algorithm development.
Embedded Systems
Embedded systems is the whole package of Hardware, Software and their Interfacing capable of doing a particular task.

Radar Systems
Traana has several firsts to its credit in the domain of Radar Systems in India. Traana was founded by Deepak K. Chandrasekaran. Deepak’s association with Radar Systems dates to design and development of the Indian Doppler Radar (INDRA). INDRA was a landmark project for India as it was the first ever large radar system designed and developed in India. Traana is the first privately owned company in India to have designed and developed a fully indigenous Short-range Radar Surveillance System which has since been duly deployed on India borders. Traana is the first private enterprise in India to have published and presented a Research Paper in an International Radar Symposium. Collectively, we have more than 100-man years of experience in design and development of Radar Systems. Our primary expertise is in Digital Signal Processing (DSP), Detection & Tracking Algorithms, Radar data Processing (RDP), Radar Displays and Command Interfaces. We have also done significant work in Radar Environment and Target Simulation Systems. The expertise Traana has gained in Radar Systems and Technology may be further used to expand to Electronic Warfare
Radars are the system that detect and track objects. It is a complex system that has various subsystems such as a radar controller, signal processing chain, display unit, transmitter and receiver, synchronisation system, etc.
(We are the first private company to develop a fully indegenious radar or we pride ourselves to be the first company to develop a fully indegenious radar.) We have extensive experience in the various subsystems through our projects such as AESA, PSRS, GPRS. Since radars require real time processing we have expertise in RTOS such as VxWorks and Linux. Tools such as Codeblocks, Matlab help in development and testing.
